Generative models have become powerful tools for robot motion generation, enabling flexible and multimodal trajectory generation. Yet, most existing approaches remain limited in handling multiple types of constraints—such as collision avoidance, actuation limits, and dynamic consistency—often addressing them heuristically or individually.
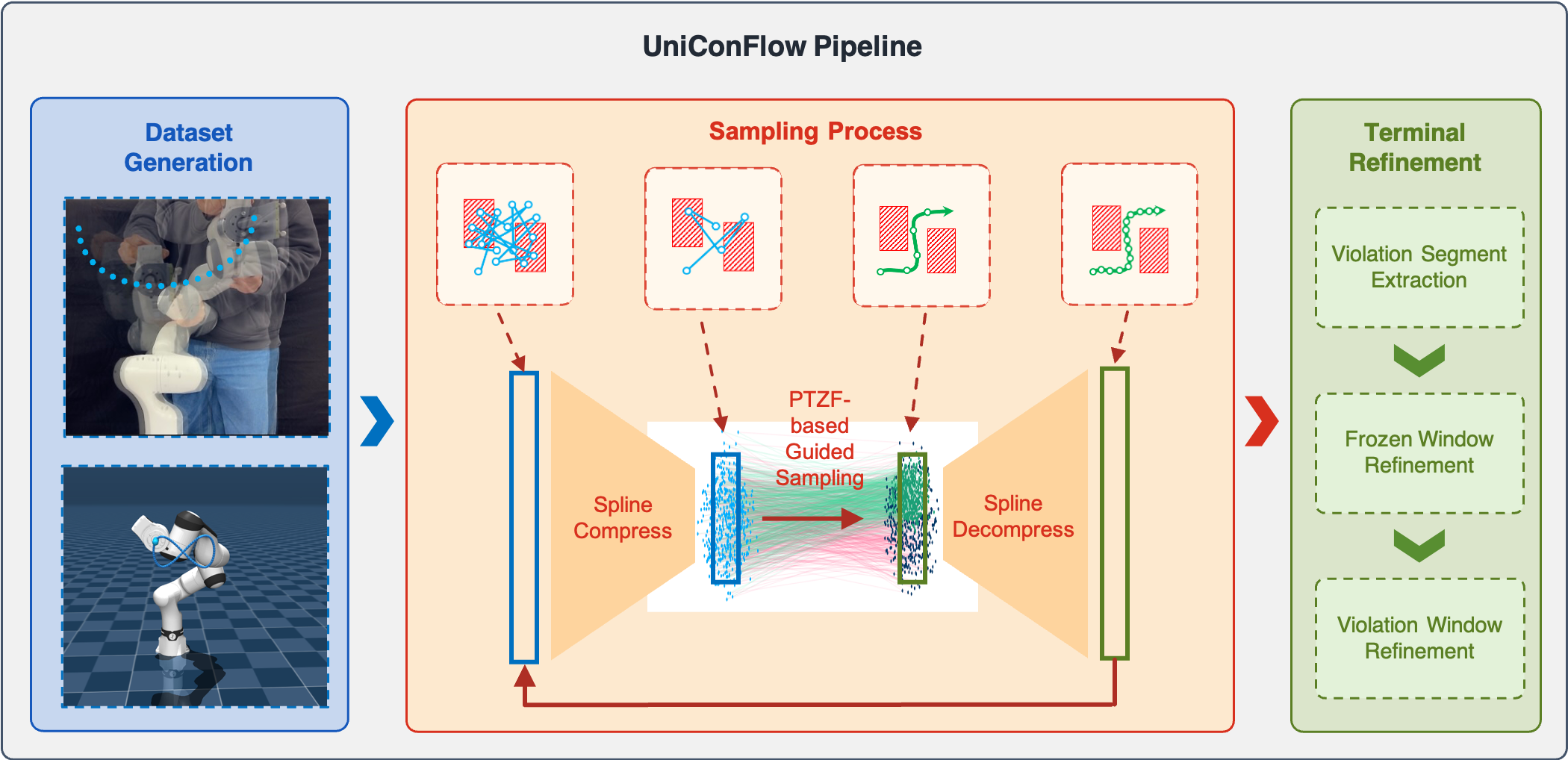
In this work, we propose UniConFlow, a unified constrained flow matching-based framework that systematically incorporates both equality and inequality constraints. UniConFlow introduces a novel prescribed-time zeroing function (PTZF) that shapes a time-varying guidance field during inference, enabling the generation process to adapt to varying system models and task requirements without retraining.
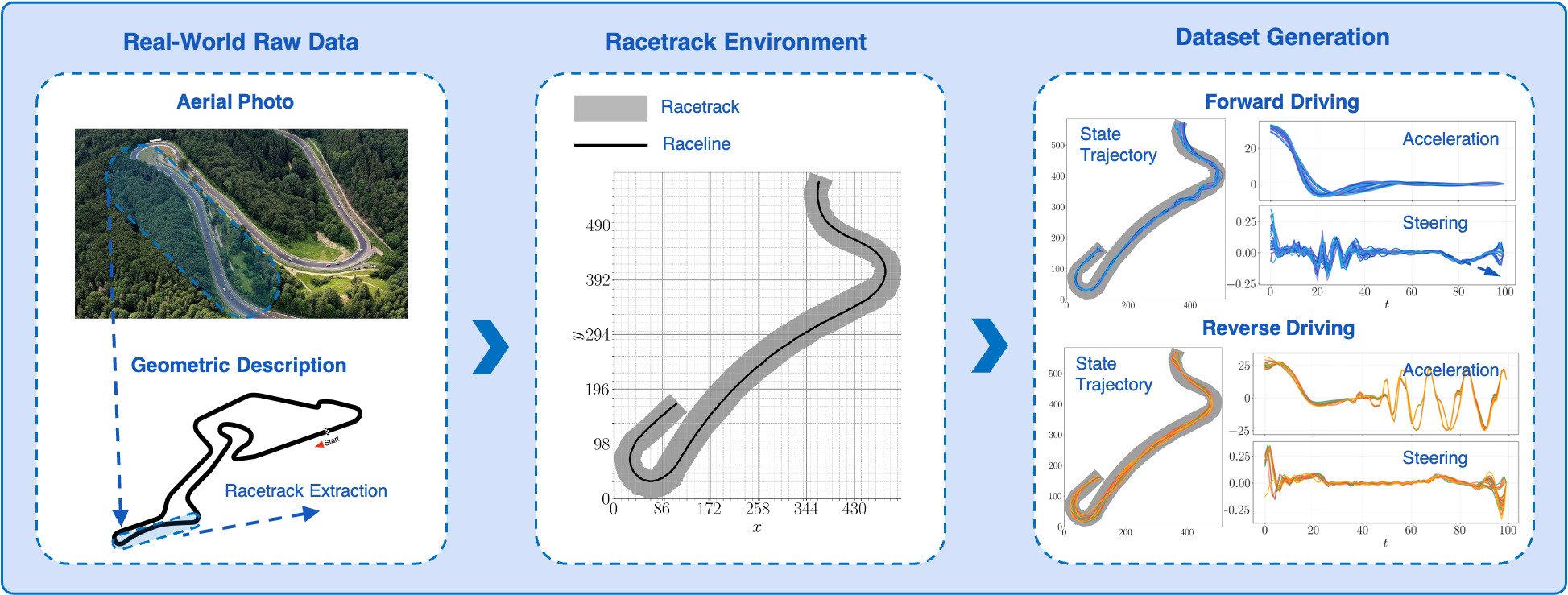
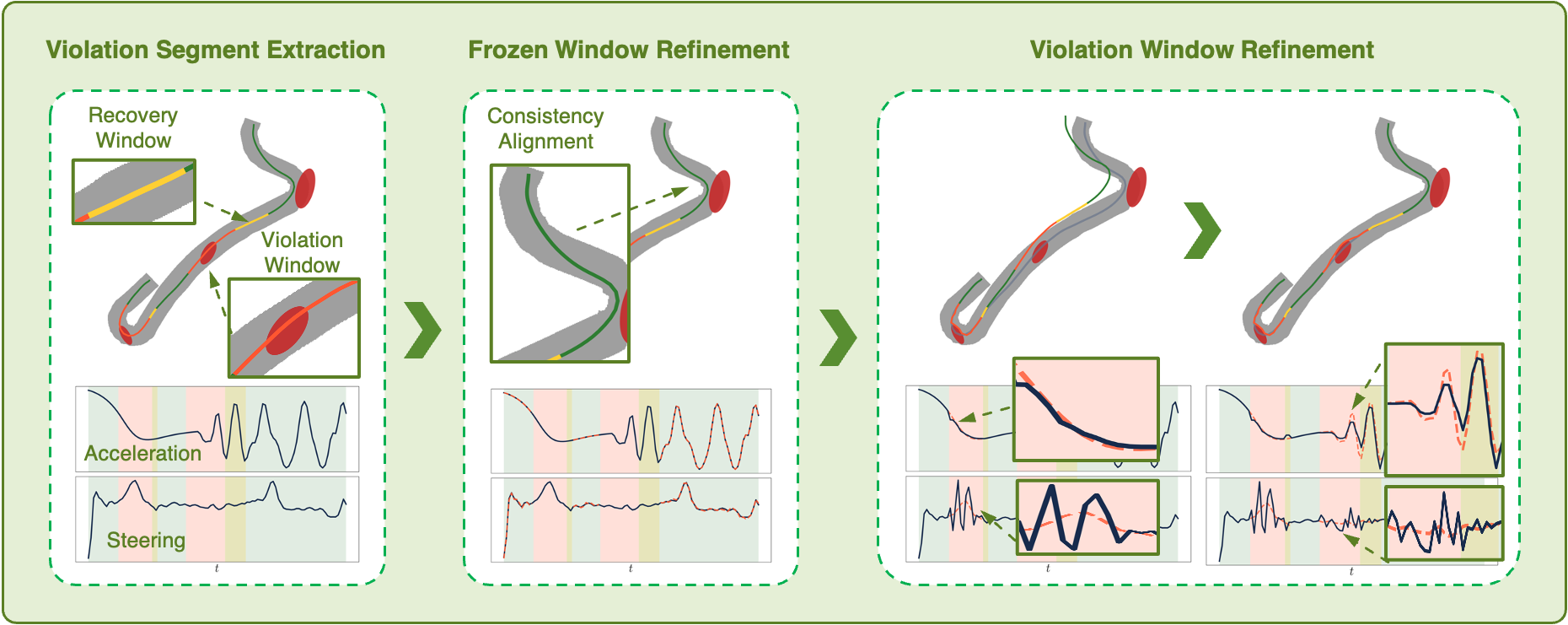
To further address computational challenges in long-horizon and high-dimensional tasks, we introduce two practical strategies: a violation-segment extraction protocol for precise refinement and a trajectory compression method. Empirical validation on double inverted pendulum, car racing, and manipulation tasks demonstrates that UniConFlow outperforms state-of-the-art generative planners in safety, kinodynamic consistency, and action feasibility.